

.: Matteo Corno - Associate Professor :.
.: Research Projects :.
 |
Design of a Semi-active Steering Damper for Sport Motorcycles Two-wheeled vehicles exhibit two oscillatory modes (wobble and weave) that can become unstable; the research carried out shows that by actively controlling the steering damping coefficient, vehicle stability and handling qualities can be improved. A first principle model has been derived, validated against real data and used to design the steering damper control law which is experimentally validated. An LPV observer allows to reduce the set of needed sensors.
|
 |
Electronic Redefinition of Four-wheeled Vehicle Lateral Dynamics The research is aimed at electronically redefining the behavior of the vehicle by acting through individual rear wheel braking. The problem can be formulated as a genuine closed loop control problem. Once the adequate set point is chosen the relevant lateral dynamics is identified from the data via a black-box approach and a robust controller designed. Experimental validations shows that the approach is successful in improving agility while cornering.
|
 |
Design of an Active Central Transfer Case Controller Front wheel drive and four wheel drive cars present a trade-off between performance and stability when accelerating in a corner. The research is aimed at investigating the potentiality of an active central transfer care. By controlling the torque transferred to the rear wheels it is possible to improve performance without impeding stability also in critical situation. A stability observer has been devised and a switching control law implemented.
|
 |
Design of a Lateral Drift Compensator for Four-wheeled Vehicles Lateral drift of a four-wheeled vehicle during braking may occur for several reasons; the aim of the research project is that of compensating the lateral drift via rear differential braking. A validated LPV model of the vehicle allow to design a gain-scheduled controller that is shown successful in reducing the lateral drift to non noticeable quantities. A lateral drift observer has also been developed.
|
 |
Design of Traction Control Systems for Motorbikes (touring, city and sport) Nonlinear systems identification and modeling techniques are employed to design a robust traction control system. The system is designed to track a slip target which is computed from the driver request on the throttle. In this way the system can provide performance and safety at the same time as the driver retains control of the vehicle. The system has been developed in collaboration with professional test riders. |
 |
Identification of Engine-to-Slip Dynamics of a Superbike The research considers the problem of modeling the engine-to-slip dynamics. Instead of using the classical approach of multi-body modeling, this work takes the challenge of directly estimating the Input/Output slip dynamics by black-box identification, using the data collected with some experiments specifically designed for this purpose, and implemented on the real motorcycle. The proposed identification protocol allows to compare the effects of two different control variables: throttle position and spark-advance. |
 |
Design of Electronic Throttle Control for Racing Motorcycles The research is devoted to the study of a servo-controller for an electronic throttle body (ETB) for ride-by-wire applications. Specifically, the open-loop dynamics of the system are studied in detail discussing the effects of friction based on appropriate experiments. The system is experimentally identified and a model-based gain-scheduled PID controller for throttle position tracking is proposed. The performance of the controlled system is compared to the intrinsic limit of the actuator and tested on an instrumented vehicle.
|
 |
Design of an Optimal Braking Strategy for Two-Wheeled Vehicles The research is devoted to the study of the braking dynamics of a high performance motorbike. It is shown how the longitudinal and vertical dynamics interact yielding a braking dynamics that is substantially different from the one of four-wheeled vehicles. The role played by the rear-brake and front suspension of braking performances is analyzed.
|
 |
SAFEBIKE REGINS The research goal is to develop a curve safe ABS for motorcycles. A motorcycle simulator is developed in Modelica, along with a model of an electro-hydraulic actuator. Tire characteristics are then used as the basis to develop an ABS controller that allows to safely negotiate braking while cornering. |
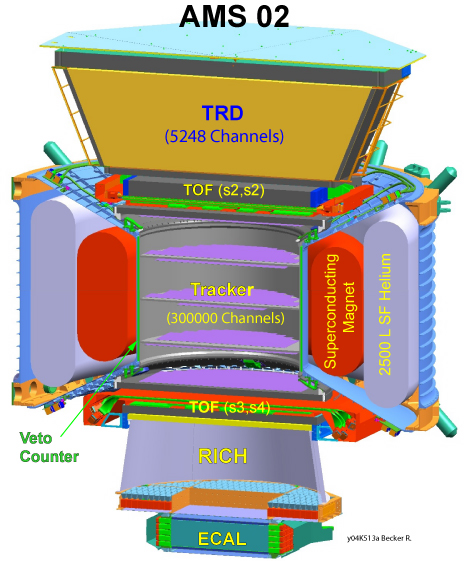 |
Design of the Attitude Control Sub-System for an Orbiting Particle Detector
|
 |
Modelization of a Common Rail for Gasoline Engines. The research is aimed at illustrating how the co-design approach can be applied to the development of a gasoline engine. An analytical, object oriented simulator is developed; the model parameters are identified and the simulator is validated using real data. Using the validated simulator, an analysis of the system dynamics is developed. This analysis provides a deep insight in the trade-offs involved in the choice of some components of the injection system. |